
Automate It
The very high resolution of UAV-based images (better than 5cm ground resolution) opens new possibilities for mapping. The human operator can easily recognize most objects in the imagery. However, for an efficient workflow, ideally objects of interest should be detected and extracted automatically from the imagery: this expedites the surveying and mapping process. Although automatic image interpretation has a long history in research, the very high resolutions faced with nowadays brings new challenges: working on object basis rather than pixel, but at the same time exploit the pixel resolution for the retrieval of land tenure object features, modelling and exploitation of context in several hierarchy levels, and efficient use of prior knowledge. WP5 (Automate It) aims to exploit the imagery captured in the UAV flights of WP4 (Fly and Create) to enable automatic land tenure feature extraction. Such an approach cannot deliver complete matching – as some tenure boundaries are only social and not visible to sensors – however, even 50% matching would radically alter tenure mapping workflow costs and times.
In this work package, we introduce an open source approach that facilitates image-based cadastral mapping. We develop an automated cadastral boundary delineation approach applicable to remote sensing imagery of different resolution. It is designed for areas, in which boundaries are demarcated by physical objects and are thus visible.
The tool’s workflow consists of (a) image segmentation, (b) boundary classification, and (c) interactive delineation:
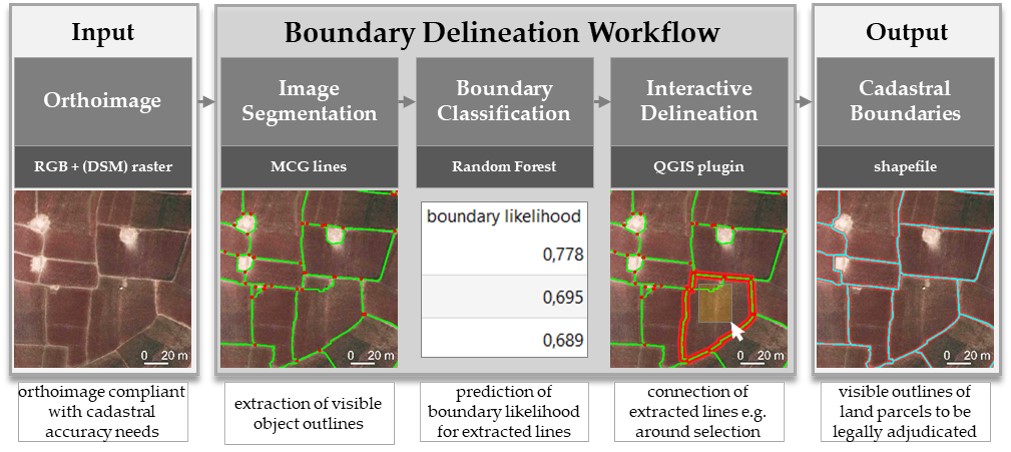
The source code be found on GitHub and can be used free of costs. Our GitHub wiki provides guidance on how to use each of the steps in the delineation tool as well as test data.
Recent Comments